Ros Cvimage Vs Mat

Cvimage Http Wiki Ros Org Cv Bridge Tutorials Usingcvbridgetoconvertbetweenrosimagesandopencvimages

The Ros Interface With Opencv Learning Robotics Using Python Second Edition Book
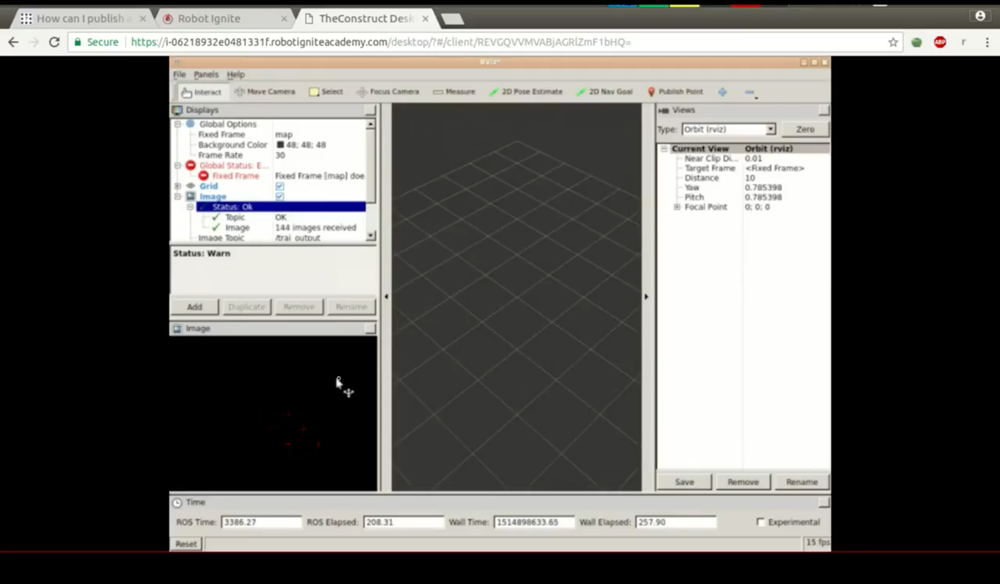
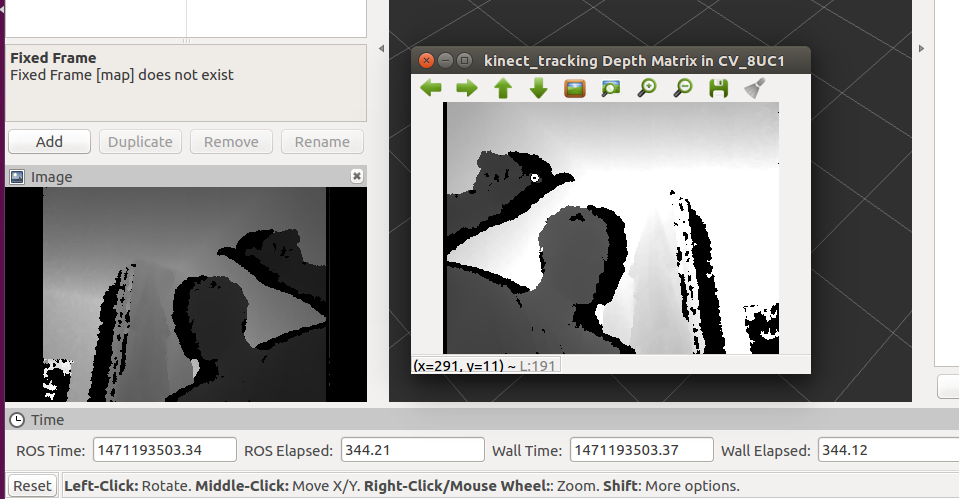
Ros Q A 086 How Can I Publish Opencv Mat Image And See It On Rviz The Construct

Frozen Black Image And Trackbar While Using Opencv And Ros Stack Overflow
Add Opencv Window As Panel To Rviz Ros Answers Open Source Q A Forum
I Need Help With An Error When Run An Opencv Program Ros Answers Open Source Q A Forum

To convert a cvimage into a ros image message use the toimagemsg member function.
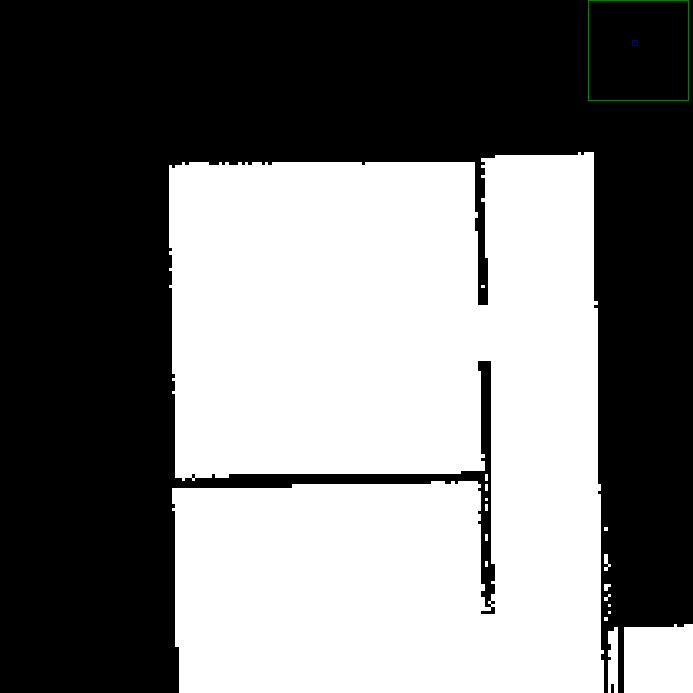
Ros cvimage vs mat. For some reason cv drawkeypoints messes up my result by virtually stretching it over the width beyond the image frame. The sole thing missing is how a cv mat can be transformed to a publishable image ros message. I am getting the following errors. However you are free to modify the returned cvimage.
I am using ros kinetic and trying to write a program that would read two videos and publish them on two different topics. An example ros node. I suspect i am generating a null pointer but i m not sure how to do it correctly. The encoding refers to the destination cvimage.
The input is the image message pointer as well as an optional encoding argument. But i think i ve made some mistake in linking opencv libraries. We will create a node that listens to a ros image message topic converts the image into a cv mat draws a circle on it and displays the image using opencv.
I do have a node that sets the filename through dynamic reconfigure and reads the image with imread. I am having a lot of trouble getting inter nodelet image transport to work. Converting opencv images to ros messages. The blob in the right topic represents the one on the top left in the left topic.
The ros wiki explains how to do so once we have a cv bridge cvimageptr but it does not explain how to construct the cvimageptr given a cv mat. Tocvshare will point the returned cv mat at the ros message data avoiding a copy if the. I tried making my code work like one of the nodelets in the image proc package and i got code that compiles but breaks when it tries do image passing. Tum ros pkg commit svn commit messages for tum ros pkg.
What i need help with. Tocvcopy creates a copy of the image data from the ros message even when the source and destination encodings match. The use of encoding is slightly more complicated in this case. I m using opencv in c to process a cv mat before printing it to a ros topic.
I will attach my code which consists of two files read cpp. The ros image message must always have the same number of channels and pixel depth as the cv mat however the special commonly used image formats above bgr8 rgb8 etc will insert.

Opencv 3 Image Edge Detection Sobel And Laplacian 2016 Computer Vision Edge Detection Image Processing Computer Vision

Ros Q A 086 How Can I Publish Opencv Mat Image And See It On Rviz Youtube

Augmented Reality On Ros
Converting Occupancy Grid To Image Ros Answers Open Source Q A Forum

Opencv And Ros By A Raspberry Pi Rover Project Yi Systems

Difference In Visualization In Opencv And Rqt Image View And Ros Rviz Issue 18 Nerian Vision Nerian Stereo Github
Accessing Cameras In Opencv With High Performance

Matlab And Ros Robot Operating System Mobile Robot System

Image Publisher Node Publishes Empty Header Ros Answers Open Source Q A Forum

Cvbridge Conversion Problem Asus Xtion Depth Image To Opencv Ros Answers Open Source Q A Forum

Ucl Drone Opencv Utils H File Reference

Pin On Proj Iot

How To Convert An Opencv Cv Mat To An Opengl Texture R3dux Org Texture Kinect Converter

